LiDAR (TF-Luna)
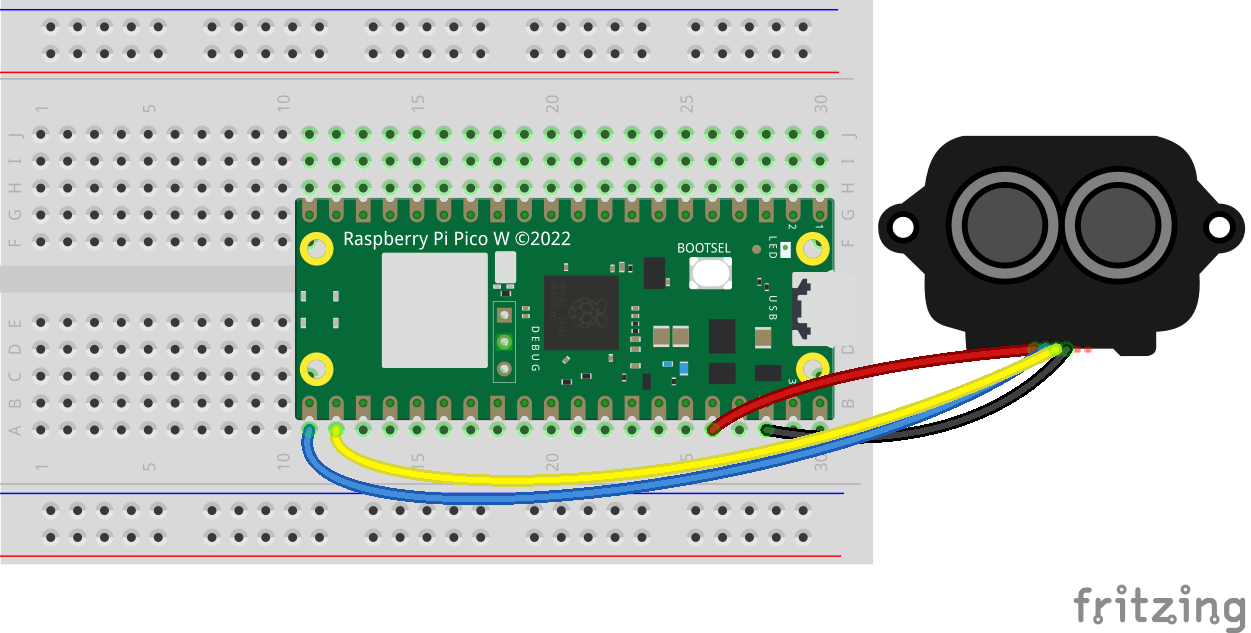
Wiring
tip
Source files for this diagram are available here
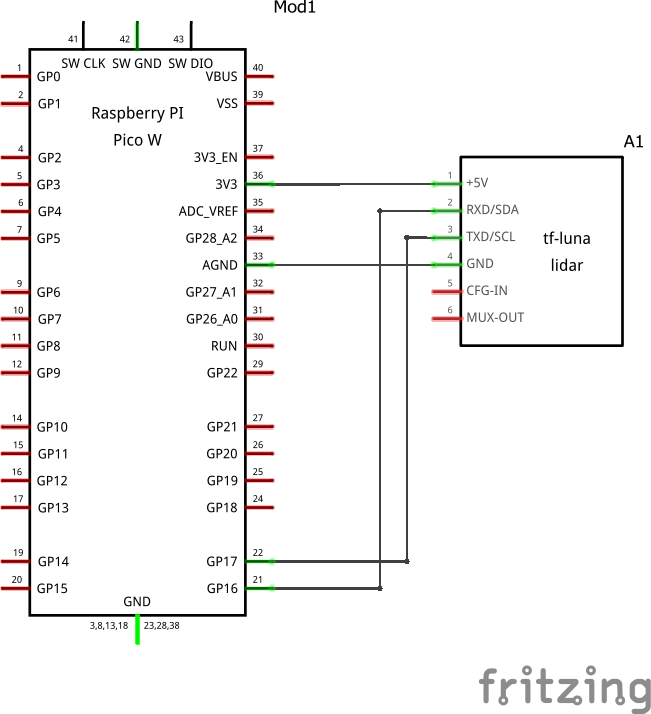
In case the above image is unclear, here's an additional schematic of the wiring as to prevent confusion:
Code
from machine import UART, Pin
import utime
from binascii import hexlify
lidar = UART(0, baudrate=115200, tx=Pin(16), rx=Pin(17))
def save_settings() -> None:
"""Saves the current settings to the Lidar."""
global lidar
lidar.write(bytes([0x5a, 0x04, 0x11, 0x6F]))
utime.sleep_ms(100)
def set_samp_rate(samp_rate: int = 20) -> None:
"""
Sets the sampling rate of the Lidar.
Parameters:
- samp_rate: The desired sampling rate in Hz.
"""
global lidar
hex_rate = samp_rate.to_bytes(2, 'big')
samp_rate_packet = [0x5a, 0x06, 0x03, hex_rate[1], hex_rate[0], 0x00, 0x00]
lidar.write(bytes(samp_rate_packet))
utime.sleep(0.1)
save_settings()
def get_version() -> str:
"""
Retrieves the Lidar version information.
Returns:
- A string representing the Lidar version.
Raises:
- RuntimeError: If the version retrieval fails.
"""
global lidar
info_packet = [0x5a, 0x04, 0x14, 0x00]
lidar.write(bytes(info_packet))
start_tick = utime.time()
while utime.time() - start_tick < 10:
if lidar.any() > 0:
bin_ascii = lidar.read(30)
if bin_ascii and bin_ascii[0] == 0x5a:
version = bin_ascii[0:].decode('utf-8')
return version
else:
lidar.write(bytes(info_packet))
raise RuntimeError("Failed to retrieve version.")
def get_lidar_data() -> tuple:
"""
Retrieves the Lidar distance, strength, and temperature data.
Returns:
- A tuple (distance, strength, temperature) with the corresponding values.
Raises:
- RuntimeError: If data retrieval fails.
"""
global lidar
while True:
if lidar.any() > 0:
bin_ascii = lidar.read(9)
if bin_ascii and len(bin_ascii) == 9 and bin_ascii[0] == 0x59 and bin_ascii[1] == 0x59:
distance = bin_ascii[2] + bin_ascii[3] * 256
strength = bin_ascii[4] + bin_ascii[5] * 256
temperature = (bin_ascii[6] + bin_ascii[7] * 256) / 8 - 256
return distance, strength, temperature
else:
return 0
utime.sleep_ms(10)
# ----- Example usage -----
# version = get_version()
# print(version)
# set_samp_rate(20)
# while True:
# try:
# distance, strength, temperature = get_lidar_data()
# print(f"Distance: {distance}, Strength: {strength}, Temperature: {temperature:.2f}")
# except RuntimeError as e:
# print(e)